현재 양산차들은
자율주행 2~2.5단계 수준,
조만간 3단계 출시 기대
18세기 영국, 제임스 와트의 증기기관은 생산 동력을 사람에서 기계로 변화시켜 대량생산을 가능케 하며 산업혁명으로 이어졌고, 자동차 산업 발전의 태동을 가져왔다. 초기 자동차의 동력원으로 사용된 증기기관은 부피가 크고 에너지원인 석탄을 외부에서 공급해서 태우며 발생하는 열로 물을 증기로 만든 뒤, 증기의 힘으로 추진력을 얻어야 했기 때문에 구조상 자동차의 외부에 둘 수밖에 없었다. 그래서 이를 외연기관(外然機關)이라고 부른다. 그 뒤 1884년 칼 프리드리히 벤츠(Karl Friedrich Benz, 1844~1929) 박사가 인류 최초로 내부에 둘 수 있는 내연기관(內然機關) 자동차를 발명하였고, 같은 해에 고틀리프 다임러(Gottieb Wilhelm Daimler, 1834~1900)와 빌헬름 마이바흐(Wilhelm Maybach, 1846~1929)도 아내의 선물용으로 4 행정(압축-폭발-팽창-배기의 4개의 왕복 운동)으로 구성된 내연기관 자동차를 만들었고, 기술이 발전하며 현재에 이르렀다. 자동차는 인류의 삶에 커다란 긍정적 변화를 미친 것은 사실이나 이에 못지않게 부정적 영향도 많으며, 대표적인 것이 기후 변화와 안전 문제이다.
자동차의 에너지원으로 사용되는 석유를 인류가 대량으로 사용하기 시작한 것은 1859년 에드윈 드레이크(Edwin Laurentine Drake, 1819~1880)가 원유를 채굴하고 증류(각종 장치를 이용, 끓여 같은 성질의 물질을 모으는 행위)하여 등유를 만들면서부터인데, 지구가 수억년 전인 백악기와 쥐라기 시대부터 자연적으로 생성했던 석유를 인간이 불과 200년의 짧은 기간에 많은 양을 채굴하여 태워서 발생하는 열을 이용하는 내연기관인 엔진에 사용하다 보니, 태울 때 발생하는 CO2와 각종 NOx, SOx 계열의 유해 가스가 발생하여 지구의 온도를 올리거나, 대기 환경에 영향을 미치고 있음은 부인할 수 없는 과학적 사실이다. 환경학자들의 추정에 의하면, 현재 매년 지구상에 배출되는 유해 가스의 40% 정도의 원인이 자동차의 내연기관에 의한다고 한다. 따라서 과학계와 산업계에서는 친환경자동차(연비가 좋거나 화석연료를 에너지원으로 사용하지 않는 자동차)의 개발에 집중하여 실제 양산하는 등 개선의 성과를 내고 있으며, 연비를 향상시킨 HEV(Hybrid Electric Vehicle), PHEV(Plug in Hybrid Electric Vehicle), FCEV(Fuel Cell Electric Vehicle), EV(Electriic Vehicle) 등이 대표적이다.
")
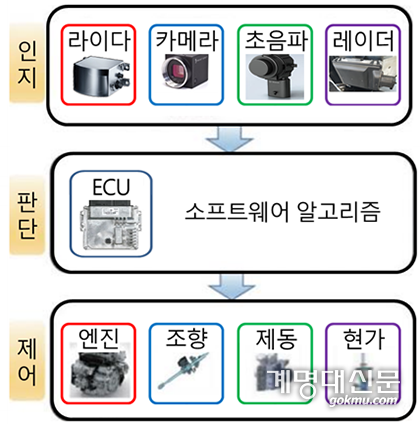
지구상에 운행 중인 자동차의 총 대수를 추정하면, 약 14억~15억대 정도이며, 매년 새롭게 만들어지는 대수는 약 8,000만대~1억대 정도이다. 이렇게 많은 자동차가 도로 위를 주행하다 보니, 사고는 필연적으로 발생할 수밖에 없었고, 이로 인한 개인과 사회적 손실도 매년 기하급수적으로 증가하고 있다. 이에 대응하기 위해 세계 각국은 안전 기준에 대한 규제를 강화하고 있으며 소비자들은 운전 편의성을 구매의 중요 요건으로 판단하면서 기술 개발의 대응 또한 빨라지고 있다. 이러한 필요성을 만족시키는 자동차의 안전과 편의성을 대표하는 기술이 자율주행자동차이다. 자율주행자동차는 1939년 뉴욕 세계박람회의 미래전시관에 “컴퓨터 시스템으로 알아서 움직이는 자동차”라는 개념으로 처음 소개되었고, 전자와 컴퓨터 기술의 비약적 성장에 힘입어, 1989년 Caneigie Mellon 대학에서 ALVIN이라는 시험 차로 미국 대륙을 최초로 횡단하면서 각 대학과 완성차 업계에서 연구가 활성화되기 시작했다. 자율주행자동차의 기본적인 기술은 “사람이 운전하던 것을 자동차가 스스로 알아서 한다”에 있으며, 이를 위해서는 사람이 운전하던 인지-판단-제어의 프로세스를 인지는 센서, 판단은 프로그램된 ECU(Electronic Control Unit), 제어는 각종 조절 장치가 대신하는 것이다. (그림 2. 참조)

그러나 상용화를 목표로 할 경우, 지구 상의 모든 자동차가 자율주행차가 될 때까지 일반 차량과 교행(交行)에 따른 문제점 발생이 불가피하고, 제조국과 소비국이 다른 현실과 중복 개발, 부품의 호환, 보험, 법규 혼제 등의 문제와 사용자 수용성 문제 등이 발생하여 세계 표준화와 기술 수준에 따라 자율주행자동차의 기능 정의에 대한 필요성 대두되었다. 이에 따라 표준화는 TC204라는 조직이 ISO(International Organization of Standardization)에 신설되어 현재 국제 표준화 제정이 진행되고 있으며, 기능 정의는 미국자동차공학회인 SAE(Society of Automotive Engineers)의 J3016 정의 방식을 준용하고 있으며, 우리나라도 이를 따르고 있다. (그림 3. 참조)
")
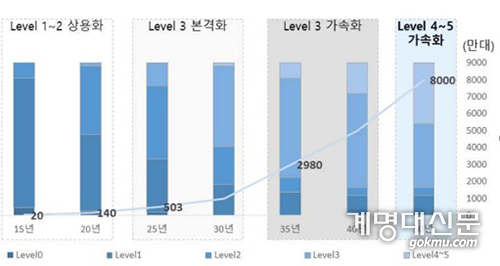
기능 별로 살펴보면, 자율주행기능이 없는 차는 “0단계”, 스마트크루즈컨트롤, 차선유지보조 등의 기능이 있는 차는 “1단계”, 고속도로 주행보조 기능이 있는 차는 “2단계”, 고속도로, 자동차전용도로 등 특정 구간에서 운전자의 요청으로만 시스템이 운전하는 기능이 있는 차는 “3단계”(이 경우 시스템 운전 중에, 운전자가 핸들을 오래 놓고 있으면 경보), 특정 구간에서 운전자가 개입 없이 시스템만으로 운전하는 기능이 있는 차는 “4단계”(이 경우 어떤 상황에서든 운전자가 핸들을 잡으면 운전제어권은 항상 사람 우선으로 변경), 운전석이 없으며 시스템이 모든 도로와 조건에서 운전하는 경우를 “5단계”로 정의한다. 현재 양산되는 차들은 2단계~2.5단계 수준이며 빠른 시일 안에 3단계가 출시 될 것으로 기대하고 있다. 기술 발전의 시기 예측 전망은 다음과 같다. (그림 4. 참조)
")
위의 분류에 따라 여러분들이 보유하거나 주변에 있는 차의 자율주행 단계는 어느 기능이 들어가 있는지를 보면, 그 차의 자율주행기술 단계를 쉽게 판단해볼 수 있으리라 생각한다.
자율주행 다음 기술은 무엇일까? 그것은 커넥티드카(Connected Car)라는 기술이며, 3초(초연결, 초융합, 초지능)로 대변되는 4차 산업 혁명의 기술을 기반하는 것으로, 자동차와 모든 것이 연결되는 V2X(Vehicle To Everthing)라는 약어로 사용된다. (그림 5. 참조)












